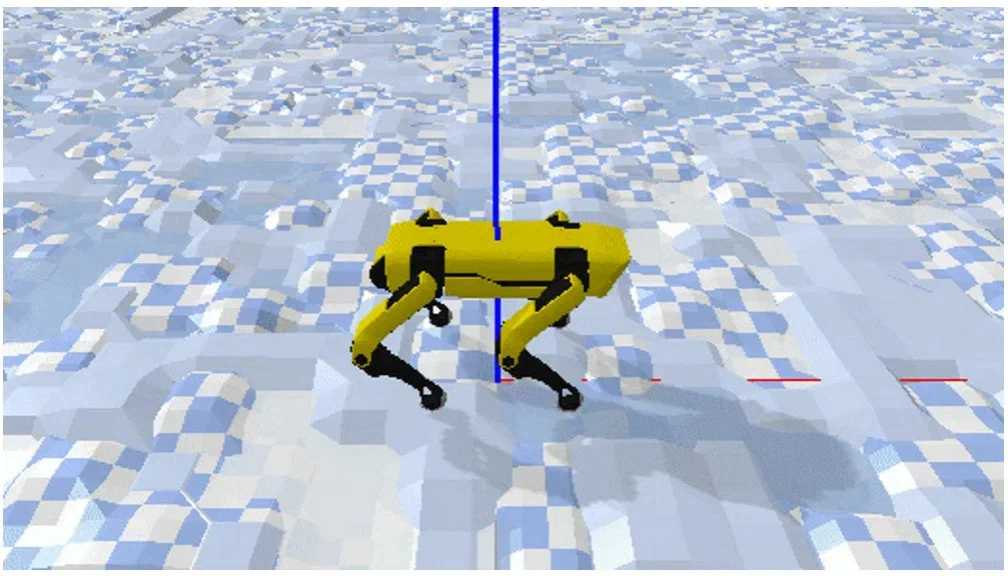
Ученые из лаборатории нейробиоморфных технологий МФТИ совместно с коллегами из Университета Лобачевского в Нижнем Новгороде разработали четвероногого робота, который умеет ходить симметричной походкой, удерживать равновесие на сложных поверхностях и принимать решения в реальном времени благодаря встроенному нейропроцессору и алгоритмам обучения с подкреплением. Результаты опубликованы в Российском журнале нелинейной динамики.
Робот на платформе SpotMicro, оснащенный 12степенями свободы и платой Orange Pi 5B, стал площадкой для отработки технологий, которые могут изменить подход к созданию автономных машин — от поисково-спасательных операций до мониторинга окружающей среды.
Шагающие роботы давно привлекают внимание исследователей: в отличие от колесных или гусеничных собратьев, они способны перемещаться по пересеченной местности, подниматься по лестницам и работать в тесных пространствах, куда не проедет ни одна машина на колесах. Знаменитый Spot от Boston Dynamics уже стал символом целого направления, но коммерческие платформы остаются дорогими и закрытыми. Открытый проект SpotMicro — это, по сути, «домашняя версия» четвероногого робота, напечатанная на 3D-принтере и доступная для экспериментов. Именно эту платформу взяли за основу физтеховские разработчики, наполнив ее совершенно новым интеллектуальным содержанием.
Робот, созданный в МФТИ, состоит из центрального корпуса и четырех ног, каждая из которых имеет три сустава: как бедро, голень и стопа у животного. Всего 12управляемых степеней свободы, и каждая из них требует точного и синхронного контроля. Корпус отпечатан из легких полимерных материалов, подшипники в шарнирах минимизируют трение, а мягкие накладки на «лапах» обеспечивают сцепление с поверхностью. Центр масс рассчитан так, чтобы робот оставался устойчивым даже при активном движении.
Источник: Минобрнауки России