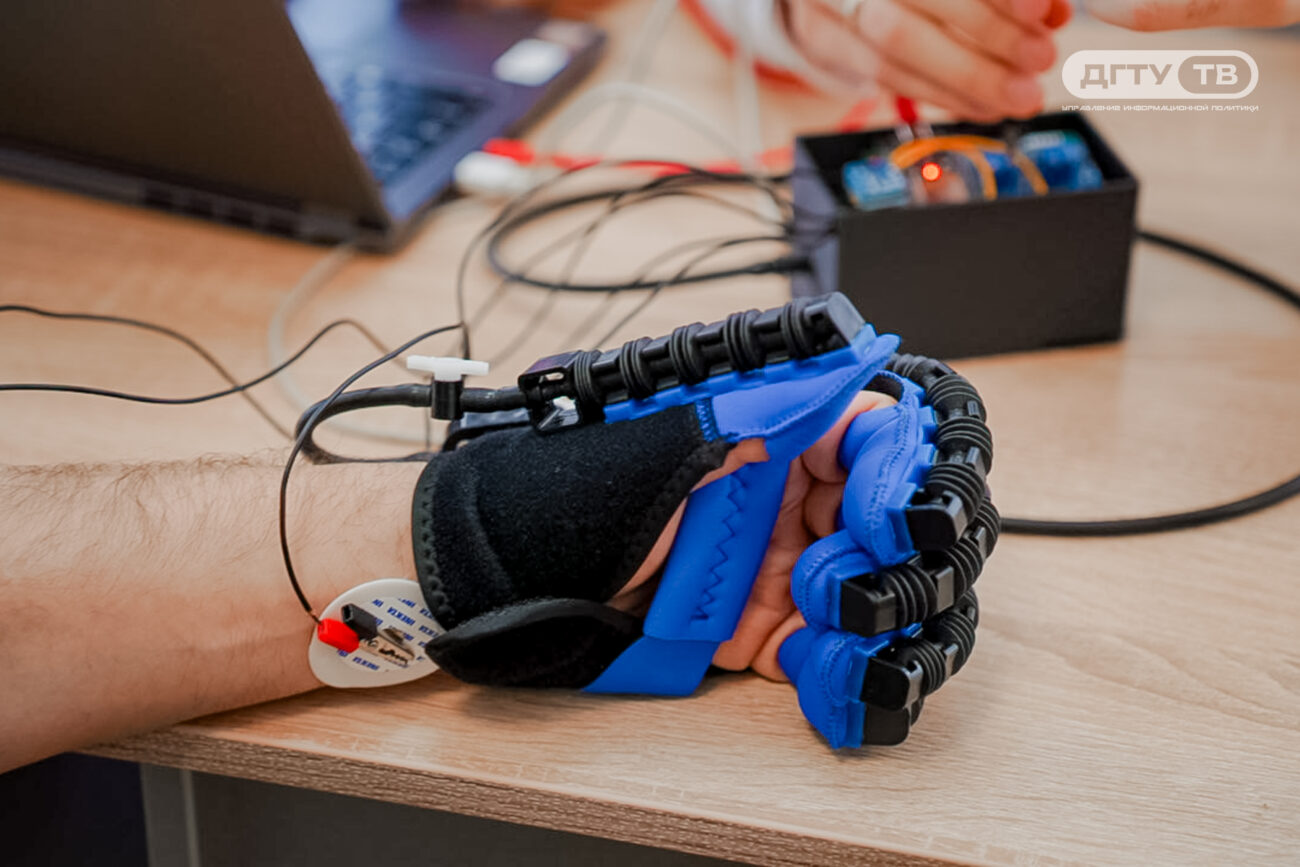
Студент Московского авиационного института (МАИ) Александр Шалаев разработал систему, позволяющую дистанционно управлять манипуляторами с тактильной обратной связью. Разработка может применяться в промышленности, медицине и исследовательских лабораториях для работы с опасными объектами.
Система состоит из носимого каркаса, рукава и перчатки с датчиками, которые считывают движения оператора в пространстве и передают сигналы на манипулятор. При этом система позволяет ощущать объект на расстоянии благодаря резистивным датчикам давления, обеспечивающим обратную связь.
"Система может использоваться везде, где применяются манипуляторы: на заводах, в исследовательских центрах, а также в медицине для проведения удаленных операций."
— Александр Шалаев, студент МАИ
Разработка особенно перспективна для медицины — она позволит хирургу проводить операции на расстоянии в экстренных случаях, когда специалист узкого профиля не может быстро прибыть на место.
В будущем создатель планирует разработать нейросеть, которая сможет обучаться на действиях оператора и выполнять типовые задачи самостоятельно. Это ускорит внедрение технологии в различные сферы и расширит возможности дистанционного управления в промышленности и медицине.
Источник: пресс-служба Московского авиационного института (МАИ)