Ученые МФТИ разработали систему управления крыльев робота-птицы, имитирующую работу нервных центров живых существ. Она предназначена для беспилотников нового поколения, которые могут эффективно использовать энергию и легко маневрировать в труднодоступных местах: лесах, пещерах, внутри разрушенных зданий или густой городской застройке. Результаты исследования представлены на Международной конференции по нейротехнологиям и нейроинтерфейсам (CNN) и опубликована в сборнике статей издательства IEEE Xplore.
Птицы легко петляют между кронами деревьев, быстро восстанавливают механику полета при столкновениях и экономят энергию, используя потоки воздуха для планирования. Отточенные миллионами лет эволюции, они превосходят любые винтовые беспилотники.
Чтобы создать таких же совершенных роботов, недостаточно просто приделать им крылья, нужно воспроизвести саму систему управления полётом, которая у птиц основана на работе нервной системы.
Эту задачу решают в лаборатории нейробиоморфных технологий МФТИ. Ученые уже создали прототип зооморфного летательного дрона — орнитоптера. А теперь разработали новую систему для его управления крыльями. Она буквально копирует центральный генератор паттернов (ЦГП) животных — работу нейронных структур в спинном мозге, ответственных за ритмичные движения. Его особенность — в синхронности: нейроны, управляющие мышцами для опускания и подъёма крыла, работают в строгой очерёдности, создавая ритмичные «всплески» активности.
Ученые создали упрощенный вариант такой системы с помощью математической модели импульсного нейрона. Она описывает поведение реальных нервных клеток, их способность генерировать «разряды» и «затухать». Между нейронной сетью, имитирующей ЦГП, и мотором на крыльях учёные внедрили важное звено — модель мышцы. Связь между ними описали с помощью системы дифференциальных уравнений. Их параметры определяют, как быстро и сильно «мышца» ответит на нервный импульс.
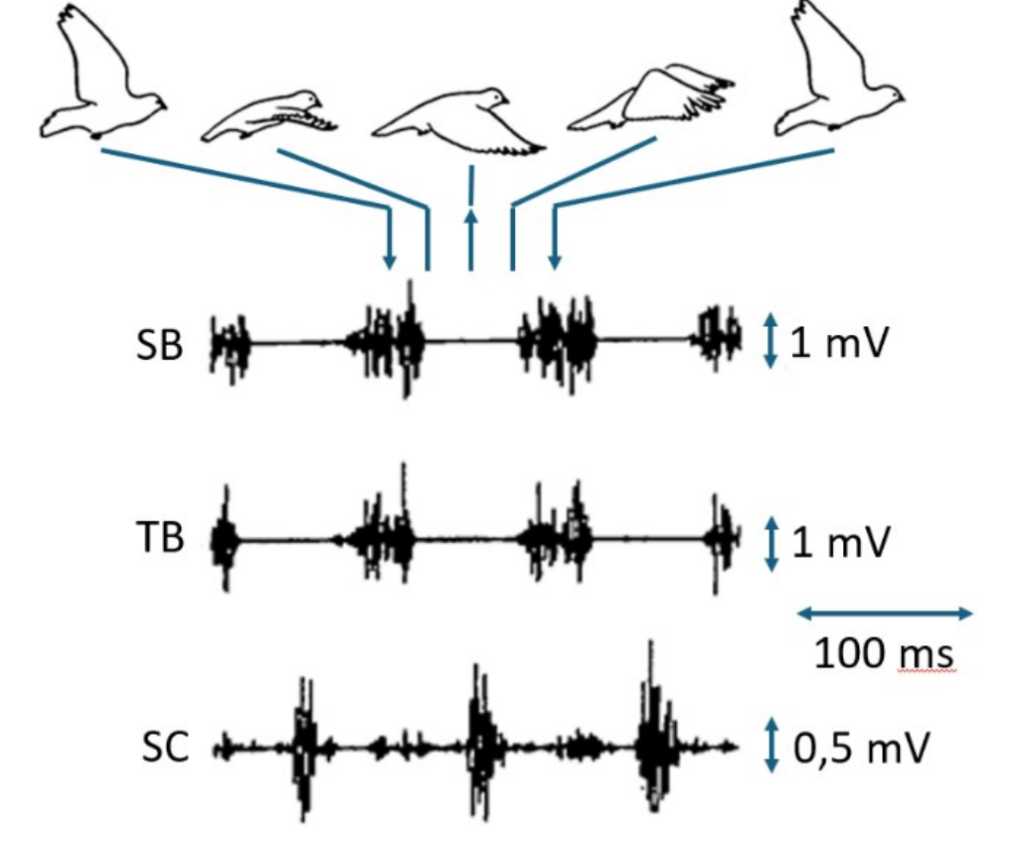
Схема активности мышц во время полёта птицы. Стрелки указывают начало взмаха, направление стрелки соответствует направлению взмаха. Показаны сигналы из передней головки грудной мышцы, задней головки грудной мышцы и мышцы надворотничка (?). K. P. Dial, S. R. Kaplan etc.. J Exp Biol 134:1– 16, 1988.
Наша нейронная сеть поделена на две половины, между которыми существуют взаимные тормозные связи. Одна половина нейронов отвечает за команду «поднять крыло», другая – опустить.
"Когда одни нейроны активируются и посылают сигнал мышце на подъём крыла, другим, отвечающим за его опускание, одновременно приходит тормозящий сигнал, не давая сработать. Когда активность первых затухает, тормозящее действие ослабевает и вторая половина активизируется. Получается замкнутый цикл: активность одной половины нейронов подавляет другую, а затем – наоборот. Так и рождается взмах крыла", — рассказал Иннокентий Кастальский, старший научный сотрудник, заместитель заведующего лабораторией нейробиоморфных технологий МФТИ.
Нейронная система не просто обеспечивает движение робоптицы. Это динамическая саморегулирующаяся система, которая без внешних команд способна поддерживать ритм и синхронизировать взмахи. Благодаря внутренним связям, она устойчива к внешним помехам и быстро возвращается к стабильному режиму работы.
"Птицы экономят энергию, точно подстраивая форму, амплитуду и фазу взмаха под режим полёта. Эти тонкие настройки «зашиты» в архитектуру их нервных центров в ходе эволюции. Наша нейронная сеть сама поддерживает устойчивый ритм взмахов и позволяет гибко, почти «на лету», менять режим полета. Плавно регулируя внутренние параметры, можно увеличить частоту взмахов для манёвра, уменьшить амплитуду для экономии энергии или сделать движения крыльев асимметричными для поворота", — поделился Виктор Казанцев, заведующий лабораторией нейробиоморфных технологий МФТИ.
Два независимых сервомотора робоптицы преобразуют сложные «нейронные» сигналы сети в точную кинематику крыла и воспроизводят естественную для птицы траекторию с ускорениями, паузами и микрокоррекциями.
Архитектура готова к подключению датчиков обратной связи, что позволит роботу-птице самостоятельно стабилизировать полет в турбулентности, парировать порывы ветра и восстанавливаться после столкновений.
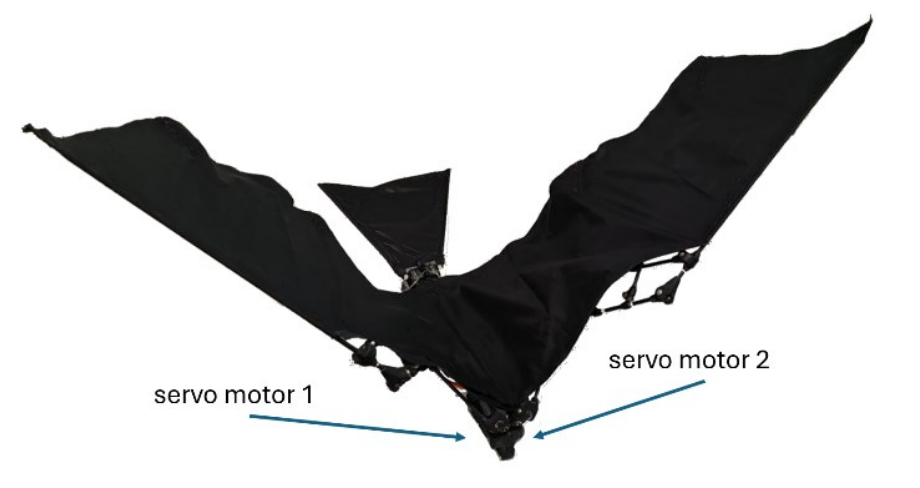
Прототип робота птицы (орнитоптера), оснащенного двумя отдельными сервомоторами.
Такие возможности открывают путь к созданию беспилотников нового класса. Они смогут работать там, где обычные винтовые дроны беспомощны: в густых лесах для мониторинга экосистем, внутри складских комплексов и разрушенных зданий для поисково-спасательных операций.
Изображение: mipt.ru