В ИТМО разработали метод автоматизации проектирования роботов, применив алгоритм MCTS (поиск в дереве по принципу Монте-Карло). Этот алгоритм широко используется в игре в шахматы и прославился благодаря программам, способным побеждать сильнейших гроссмейстеров.
Аспиранты университета адаптировали MCTS для создания инструмента, который генерирует дизайны робототехнических устройств, способного находить оптимальные решения всего за несколько часов, в отличие от ручного проектирования, которое занимает более недели. Результаты работы были представлены на конференции IEEE Intelligent Robots and Systems (IROS).
При проектировании роботов инженерам необходимо учитывать множество факторов: форму, внутреннюю структуру, кинематические и динамические характеристики, производственные методы, выбор материалов и сенсоров. Часто эти параметры могут противоречить друг другу, что усложняет создание идеальной конструкции, соответствующей всем требованиям клиентов. Это приводит к необходимости искать баланс между различными аспектами и перебору множества возможных вариантов, что затягивает процесс разработки и увеличивает субъективность выбора.
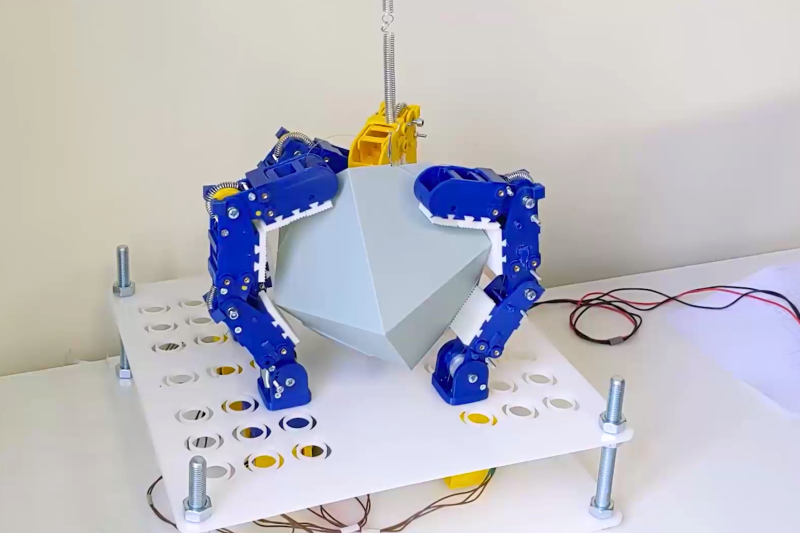
Автоматизация проектирования решает эту проблему. Аспиранты ИТМО использовали MCTS для анализа всех возможных решений и оценки их эффективности через симуляцию, предлагая наилучший вариант. Разработанный инструмент для выбора оптимального дизайна захватных устройств получил название «Росток».
Для запуска алгоритма инженеру необходимо определить начальные параметры проектируемого устройства, такие как количество пальцев, фаланг, шаг изменения геометрических характеристик и другие. Также важно установить границы информационного пространства, в пределах которого алгоритму следует искать решения. Эти границы могут быть определены максимально широко, чтобы не ограничивать программу. Опираясь на вводимые данные, алгоритм исследует все доступные варианты дизайна и проверяет их на эффективность с помощью имитационного моделирования, в процессе которого создаются разрабатываемые механизмы и моделируется их работа. Каждой из моделей присваивается оценка. Она основана на том, насколько эффективно решает поставленные задачи. В результате алгоритм сортирует все конструкции от наилучших к наихудшим и представляет пользователю список моделей с наивысшими показателями.
Алгоритм может “перебрать” тысячи комбинаций и численно обосновать выбор лучших из них — в отличие от инженера, который из-за лимита времени и ресурсов может рассмотреть ограниченное число технических решений и руководствуется при их выборе опытом, техническими знаниями и инженерной интуицией. Сейчас бигтехи активно используют нейросети для создания новых технологичных продуктов. Однако для обучения ИИ-моделей требуется большое количество реальных данных. А собрать эту информацию непросто. Наш алгоритм условно “обучает сам себя”, работая в симуляторе и так получая нужные данные. Поэтому алгоритмы генеративного дизайна могут стать хорошей средой для обучения нейросетей, так как они будут давать ИИ необходимый материал для развития.
* Кирилл Жарков, один из авторов проекта, аспирант, младший научный сотрудник лаборатории «Биомехатроника и энергоэффективная робототехника» ИТМО
Конструкции захватных устройств, которые сгенерированы алгоритмом, были успешно протестированы в практике. Разработчики также испытали пайплайн внедрения технологии генеративного дизайна. Созданные прототипы успешно справились с задачей захвата и удержания объектов манипуляции. Стоит отметить, что на сегодняшний день симулятор не учитывает все внешние факторы, которые могут возникнуть в реальных условиях. Поэтому в будущем разработчики намерены доработать код, чтобы сократить разрыв Sim2Real — разницу между данными виртуальных экспериментов и реальными результатами, получаемыми инженерами.