Ученые Пермского Политеха разрабатывают уникальный проект по созданию роботов для очистки крупных территорий, таких как леса и степи. Эти роботы смогут распределять задачи и эффективно убирать мусор, минимизируя энергозатраты и время работы.
Экологическое загрязнение становится все более актуальной проблемой. По данным специалистов, лишь 1–2% населения участвует в сборе мусора, тогда как масштабы загрязнений продолжают расти. Разработка автоматизированных решений становится необходимостью, особенно для труднодоступных зон. Однако существующие модели роботов-мусорщиков часто работают неэффективно, тратя ресурсы на обработку чистых участков.
«Мы предложили распределенную модель работы: небольшие роботы проводят разведку и строят карты загрязнений, а крупные собирают мусор по этим данным. Это снижает потери энергии и минимизирует повреждения территории»,
– Антон Посягин, доцент кафедры «Автоматика и телемеханика» ПНИПУ
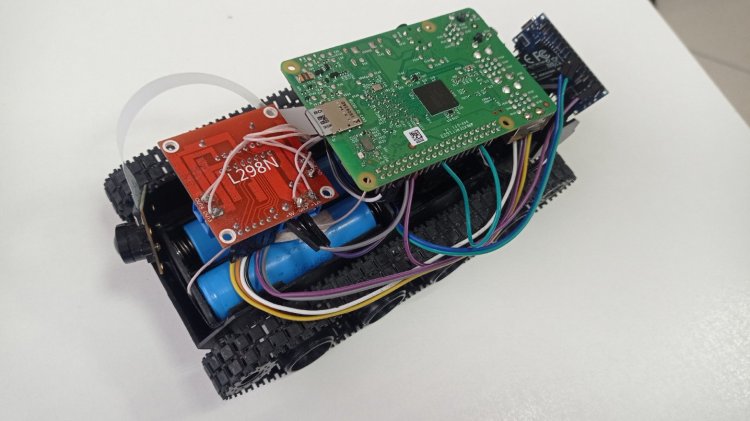
Ключевая часть проекта — создание робота-разведчика, компактного устройства с гусеничными колесами для проходимости. Оснащенный камерами, радиомодулями и системой мониторинга, он собирает данные о загрязнении и передает их другим агентам. Ученые также разработали эффективные алгоритмы маршрутизации, такие как «спираль», позволяющий вдвое сократить время уборки и количество шагов роботов.
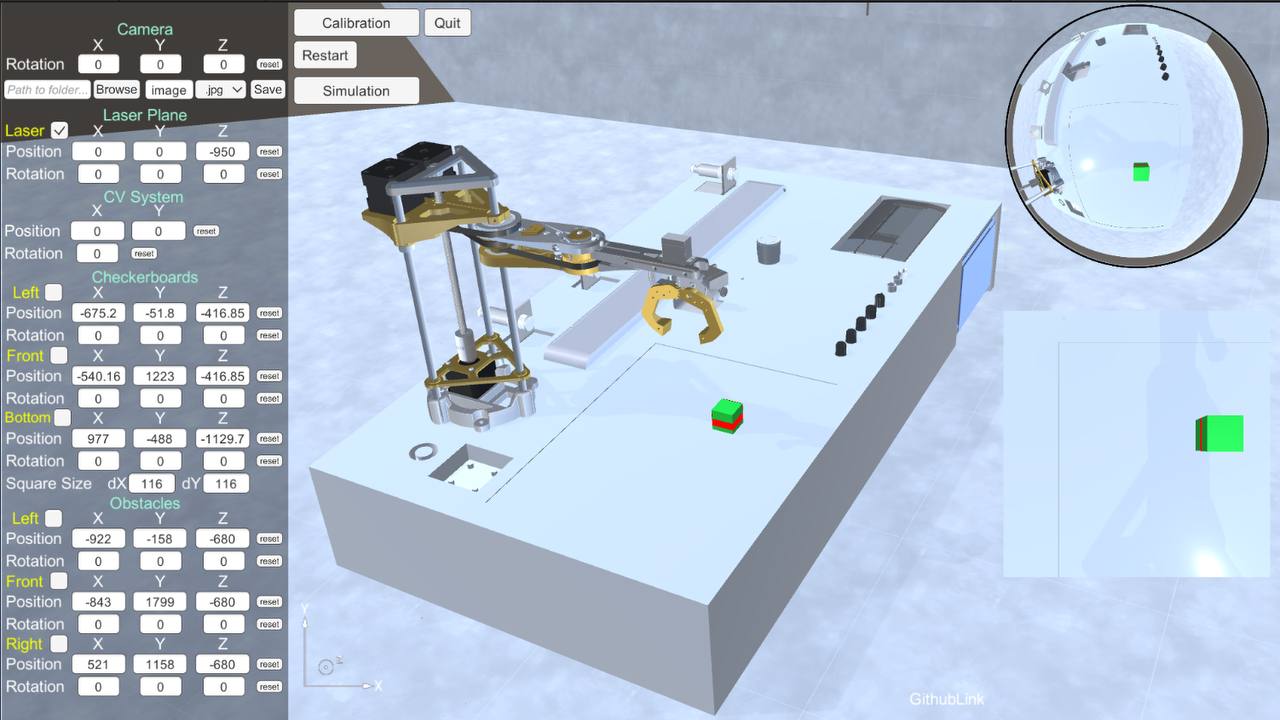
Испытания на симуляторах показали, что распределение задач между несколькими агентами значительно повышает продуктивность системы. Это особенно важно для сложных местностей, где точная и быстрая уборка мусора минимизирует воздействие на окружающую среду.
Проект, поддержанный программой «Приоритет 2030», имеет потенциал для масштабного применения. Внедрение таких технологий не только упростит борьбу с загрязнениями, но и станет важным шагом в направлении устойчивого развития и защиты окружающей среды.
Источник информации и фото: пресс-служба ПНИПУ