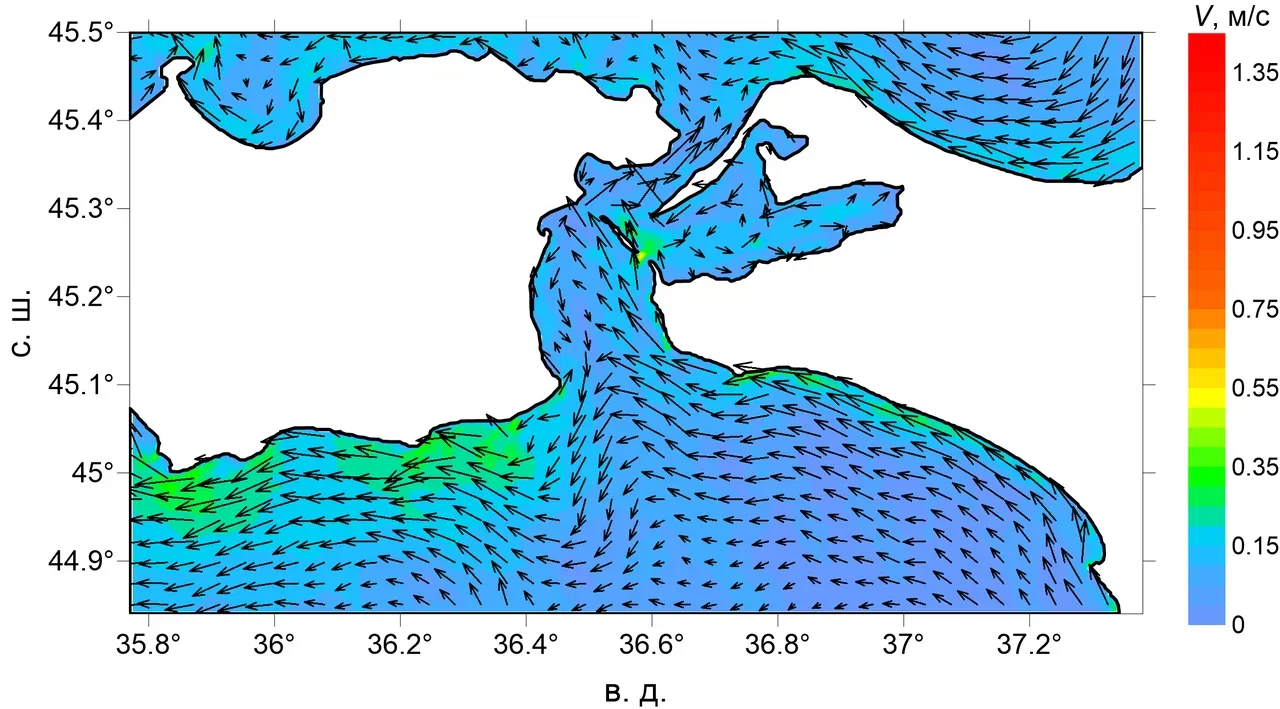
Допустим, вам нужно добраться из точки А в точку Б за минимальное время, но управлять движением нельзя напрямую, словно рулем автомобиля. Можно лишь выбирать направление в каждый момент, отдавая штурману единственный приказ: «Держи курс туда, где, по твоему мнению, ближе к цели». Звучит как забавный интеллектуальный квест, но именно такие задачи — с управлением по принципу «минимакс» — лежат в основе множества реальных процессов: от траекторий космических аппаратов до экономического планирования. Математики называют их уравнениями Гамильтона, а решение, которое они ищут, — функцией, показывающей, сколько времени займет самый быстрый маршрут из любой точки.
И тут возникает главная математическая драма. В реальной жизни целевое множество (скажем, спасательный круг на воде или финишная черта) редко бывает идеально гладким, как бильярдный шар. Часто оно имеет углы, зазубрины или вообще невыпуклые формы. Классические методы построения решений на таких «колючих» множествах терпят фиаско: функция оптимального времени становится негладкой, появляются особые точки, где навигация дает сбой. Грубо говоря, в углу бассейна интуитивный маршрут «плыть напрямую к ближайшей точке» перестает работать, и пловцу приходится принимать сложное решение: к какому из двух бортов прижиматься.
Исследователи из Института математики и механики УрО РАН разобрались с этой проблемой, используя довольно остроумный подход. Они решили не сражаться с негладкостью, а… взять ее в союзники. Для этого они ввели понятие «псевдовершины» — этакого математического ежика на границе, где начинается неразбериха с выбором направления. Оказалось, что поведение решения (то есть карты кратчайших маршрутов) зависит от того, насколько острой или, наоборот, прилизанной является эта вершина.
Главное открытие звучит обнадеживающе: оказывается, даже у самых своенравных невыпуклых фигур есть «чебышёвский слой» (приграничная зона, где у любой точки есть ровно одна ближайшая точка на множестве, а значит, функция расстояния ведет себя гладко и предсказуемо) — своеобразная зона комфорта, примыкающая к границе. Пока вы находитесь в этом слое (то есть не слишком далеко от финиша), навигация остается простой и предсказуемой: кратчайший путь единственен, а функция времени ведет себя как воспитанный гладкий ученик, без истерик и скачков производных. В этом слое можно смело пользоваться формулами классического анализа и не бояться сюрпризов.
Чтобы было понятнее, авторы приводят пример из реальной математической жизни. Они берут множество, граница которого с одной стороны — привычная парабола, а с другой — степенная функция, что делает ее на удивление плоской у основания. Эта граница имеет две псевдовершины: одну в нуле, где кривизна слева и справа отличается (эдакий стык двух разных линий), и другую поодаль, где кривизна достигает экстремума. Используя теорию «альфа-множеств» и хитрые опорные шары (которые, словно математические увеличительные стекла, помогают исследовать границу), они вычисляют толщину того самого спасительного слоя, в котором решение остается гладким.
Самое забавное, что в этой геометрической головоломке принимают участие не только сами псевдовершины, но и их «маркеры» — некие числовые характеристики, которые могут быть даже бесконечными. Исследователи с математическим юмором доказывают, что если в псевдовершине производные второго порядка терпят разрыв (как в случае с нашей параболой), то в зоне гладкости можно смело раздувать слой до вполне конкретной величины. А если кривизна ведет себя прилично, то и слой получается предсказуемо толстым.
Практическая польза от этого исследования выходит далеко за рамки чистой математики. Зная, где находится чебышёвский слой, инженеры могут гарантировать, что в этих зонах системы управления будут работать без сбоев. Для задач оптимального быстродействия это означает, что можно строить надежные алгоритмы, не опасаясь, что в какой-то неожиданной точке компьютеру придется выбирать между двумя равноценными и разрывающими логику траекториями.
В общем, эта работа — изящный пример того, как математики приручают негладкость, находя в ней скрытый порядок. Вместо того чтобы бояться углов и изломов на границе, они научились определять зоны, где эти особенности не могут испортить решение. Это как если бы штурман научился предсказывать, где навигатор начнет глючить, и заранее прокладывал маршрут в обход этих мест, гарантируя спокойное и предсказуемое путешествие к цели.
Исследование опубликовано в журнале «Вестник Удмуртского университета. Математика. Механика. Компьютерные науки»