
Исследователи из Университета Тохоку и Швейцарского федерального технологического института в Лозанне при поддержке Human Frontier Science Program расшифровали гибкие механизмы управления двигателем, лежащие в основе ходьбы саламандры.
Четыре ноги могут перемещаться в сложной, непредсказуемой и неструктурированной среде. Впечатляющие способности благодаря их координации тела и конечностей.
Саламандра — отличный образец для изучения механизмов координации тела и конечностей. Это амфибия, которая использует четыре ноги и ходит, раскачиваясь слева направо в движении, известном как колебание.
Нервная система земноводных проще, чем у млекопитающих, и они меняют свой стиль ходьбы в зависимости от скорости движения.
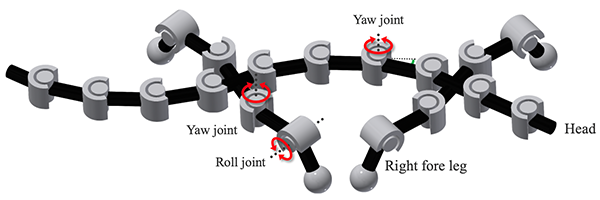
Чтобы расшифровать движение саламандры, исследователи под руководством профессора Акио Исигуро из Исследовательского института электрических коммуникаций Университета Тохоку смоделировали нервную систему саламандры математически, а потом физически смоделировали эту модель.
Создавая модель, исследователи выдвинули гипотезу, что ноги и тело контролируются для поддержки других движений путем обмена сенсорной информацией. Затем специалисты воспроизвели переходы походки саламандр в зависимости от скорости с помощью компьютерного моделирования.
«Мы надеемся, что это открытие дает представление о важном механизме адаптивного и универсального передвижения животных», — говорит Исигуро.
Исследователи уверены, что их открытие поможет в разработке роботов, которые могут двигаться с высокой маневренностью и адаптируемостью за счет гибкого изменения паттернов координации тела и конечностей.
Результаты работы опубликованы в журнале Frontiers in Neurorobotics.

Нет комментариев